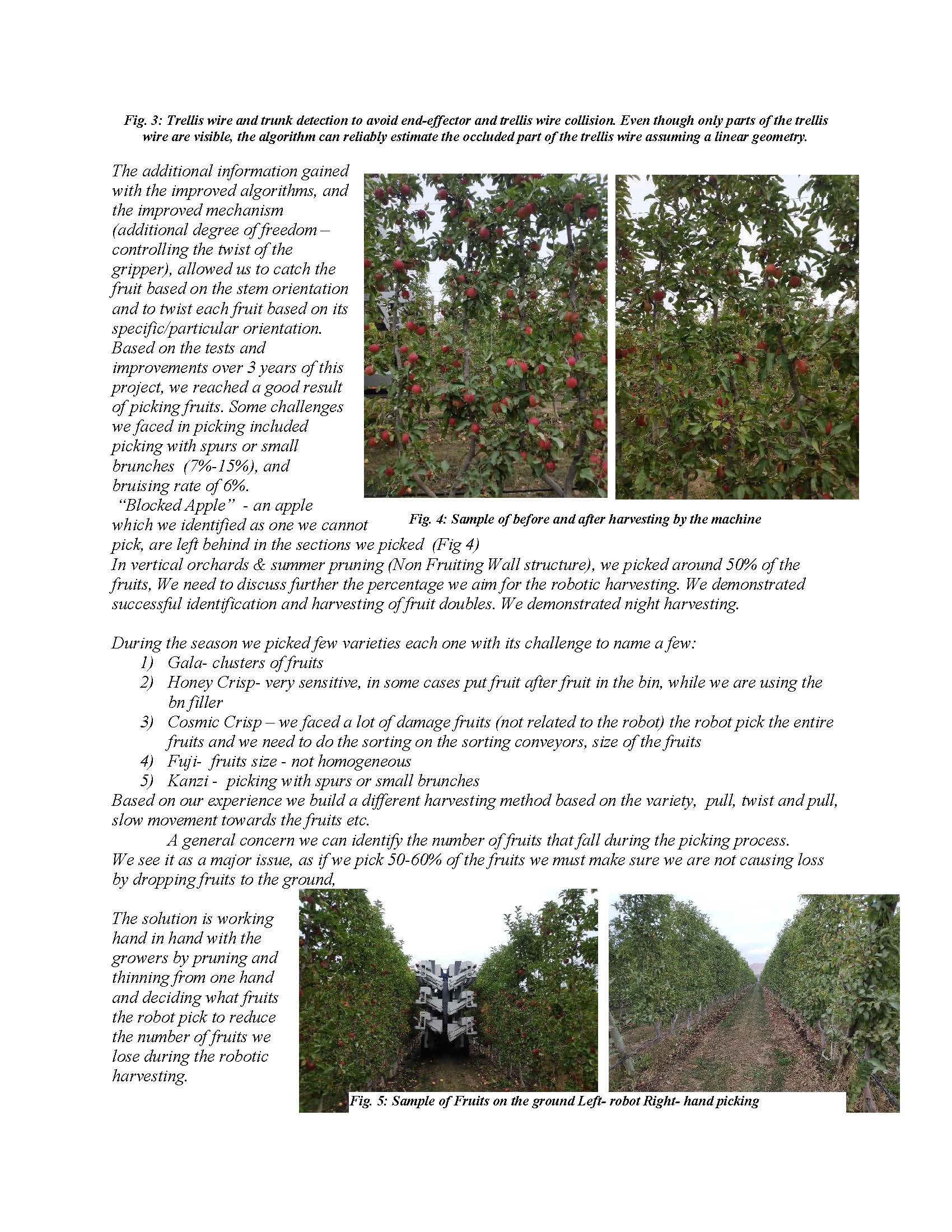
Summary: The long-term goal of this project is to develop an affordable, effective and sustainable production system for apples through adoption of integrated horticultural and engineering solutions. The Lessons from earlier efforts of Co-PI Kahani (FFRobotics), PD Karkee and other investigators, suggest that multipurpose platforms equipped with efficient and fast robotic mechanisms at a reasonable cost will be needed to streamline labor-intensive orchard operations (Pruning, Thinning and harvesting) . Furthermore, robotic systems must be developed in cohort with horticultural that optimizes the interaction between human, plant and robot. FFRobotics, is developing full-scale fruit-picking robots that consists of 12 arms supported by a low-cost machine vision system and has been tested in apple orchards in WA and Israel. While a single use in operation, harvesting is the first implementation, we believe that in order to have a sustainable solution we must develop a multi-purpose robot for the orchard.