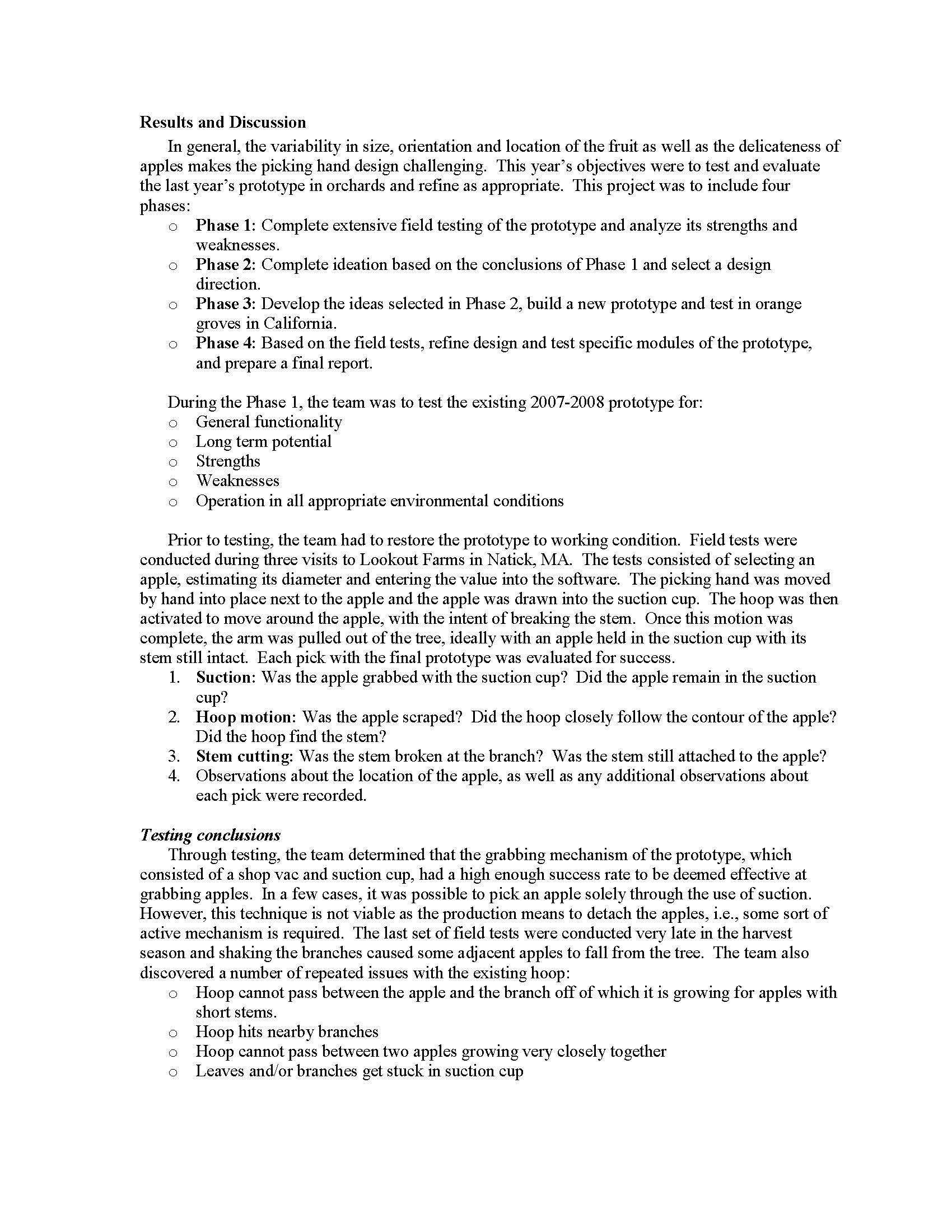
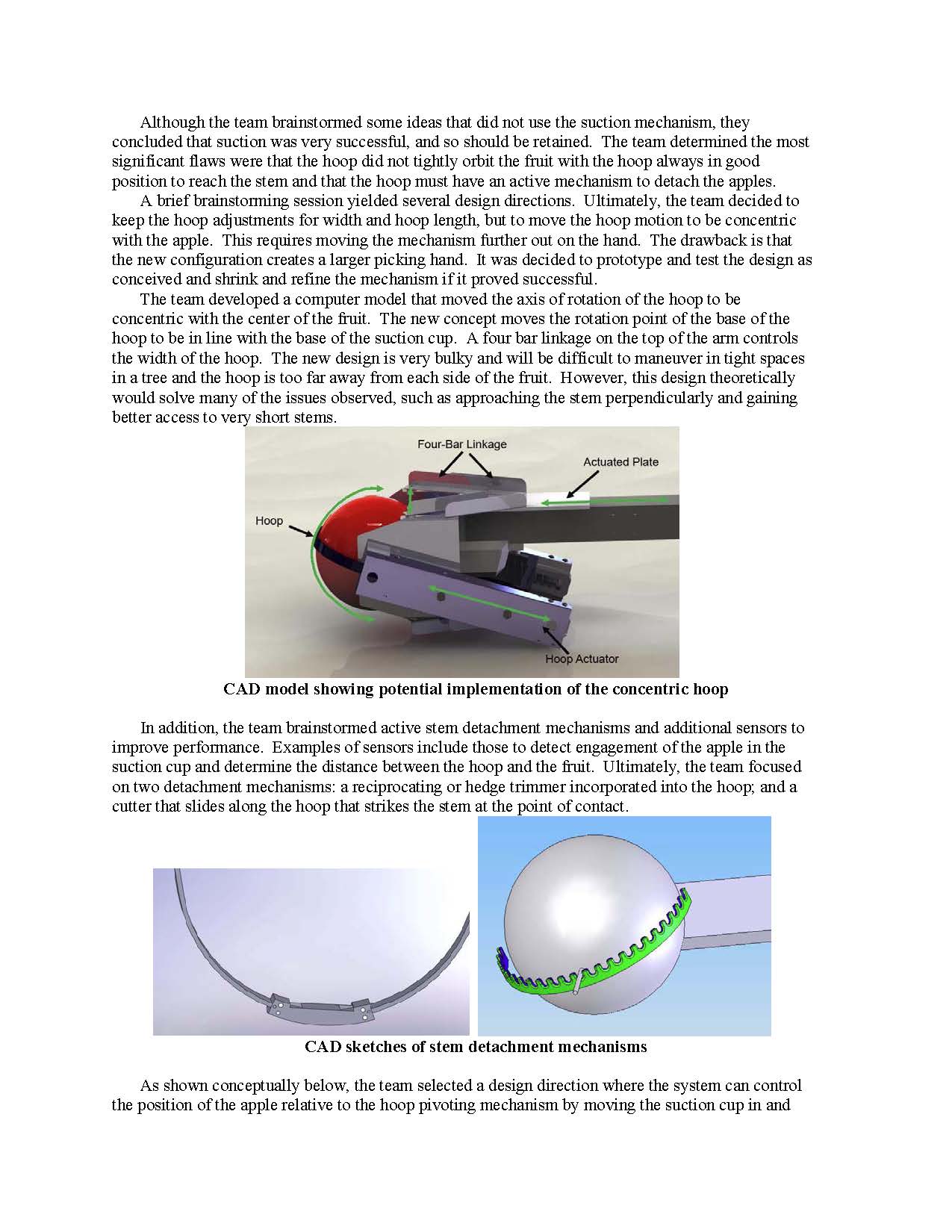
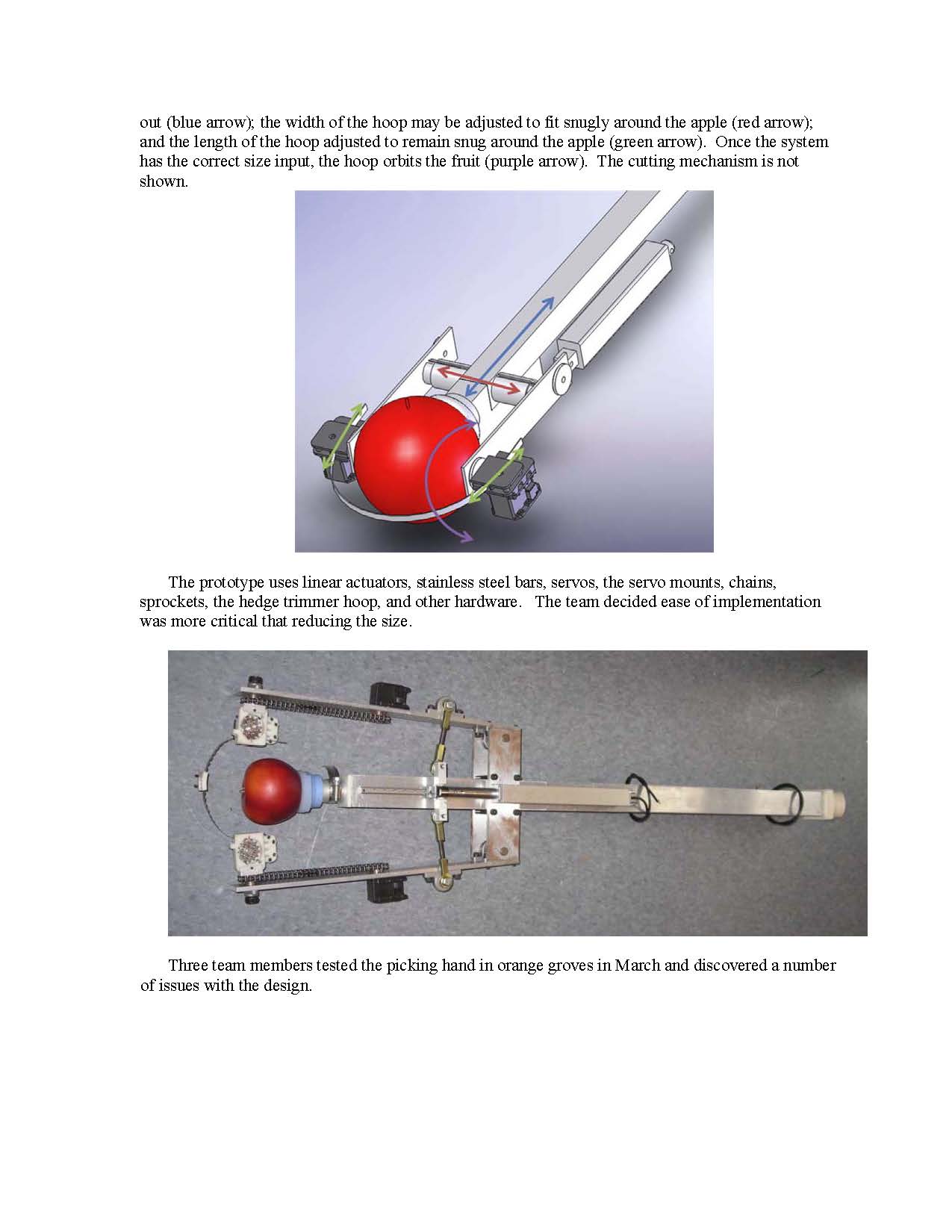
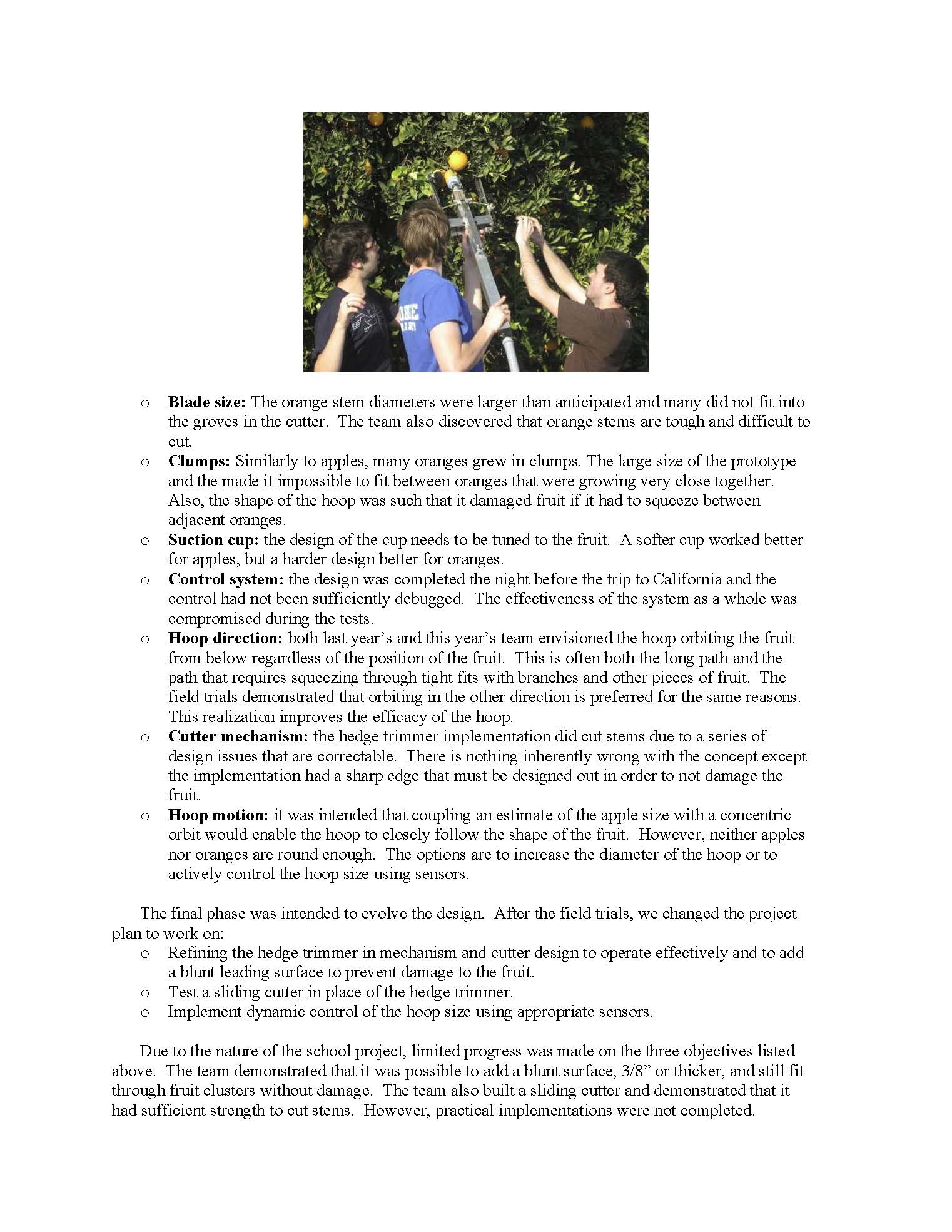
Summary: A viable picking hand represents one of the remaining unsolved critical systems for mechanized apple harvesting. The specification for a robot harvester is that it must successfully pick at least 95% of the apples. This is a high hurdle and affects the requirements for the picking hand. During operation, the picking hand must harvest all the fruit from a tree and place each piece into the conveyor that moves the fruit to the bin. The hand must gently hold the fruit of different sizes and work delicately and reliably regardless of whether the fruit is hanging freely; leaning against or partially obstructed by other fruit, branches or leaves. It must cut or snap the stem as desired and function for millions of cycles each year. Further complicating the design is that the picking hand is part of the larger harvester and must compensate to work with the system as a whole.