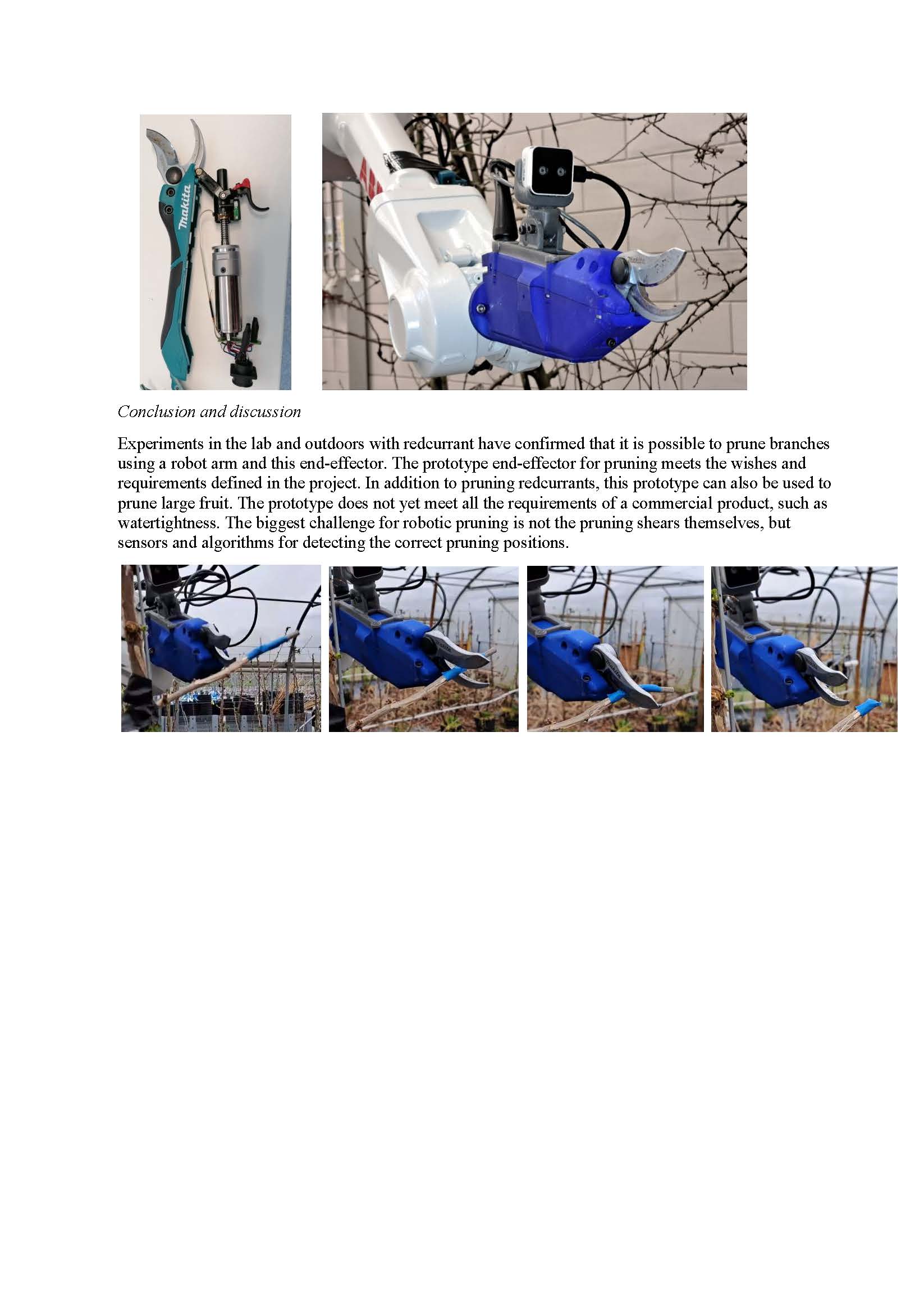
Summary: Experiments in the lab and outdoors with redcurrant have confirmed that it is possible to prune branches using a robot arm and this end-effector. The prototype end-effector for pruning meets the wishes and requirements defined in the project. In addition to pruning redcurrants, this prototype can also be used to prune large fruit. The prototype does not yet meet all the requirements of a commercial product, such as watertightness. The biggest challenge for robotic pruning is not the pruning shears themselves, but sensors and algorithms for detecting the correct pruning positions.