Low-cost, reliable soft arm for automated tree fruit
Author: Ming Luo
Published: 2023
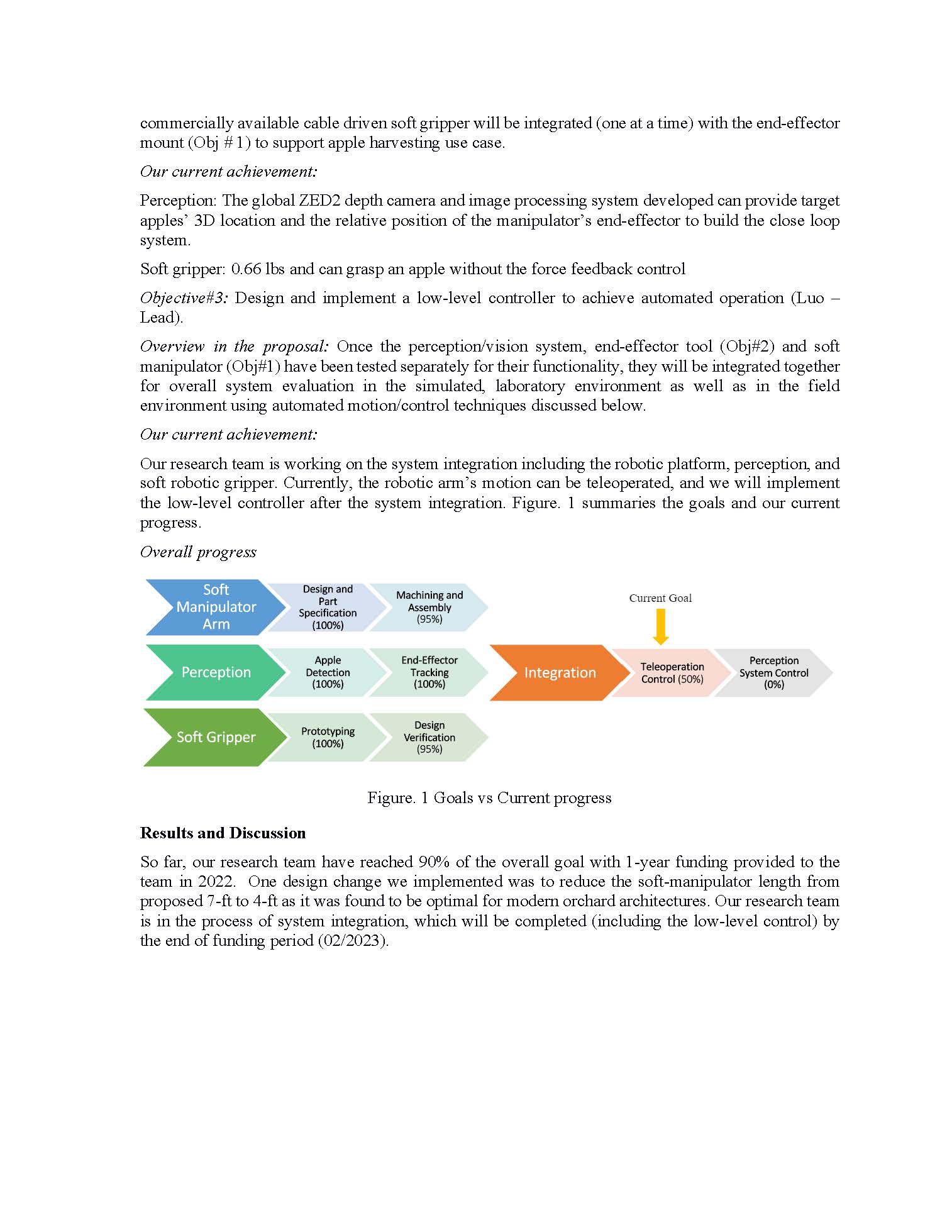
Summary: During this one-year project, we have completed and verified all sub-components of our soft growing manipulator to achieve robotic apple harvesting with a soft manipulator: robot design and prototyping, local perception system development, and the end-effector tools. In the rest of this project period (by Feb, 2023), we will conduct the system integration and implement the low-level position control to our system.